
Squirtle
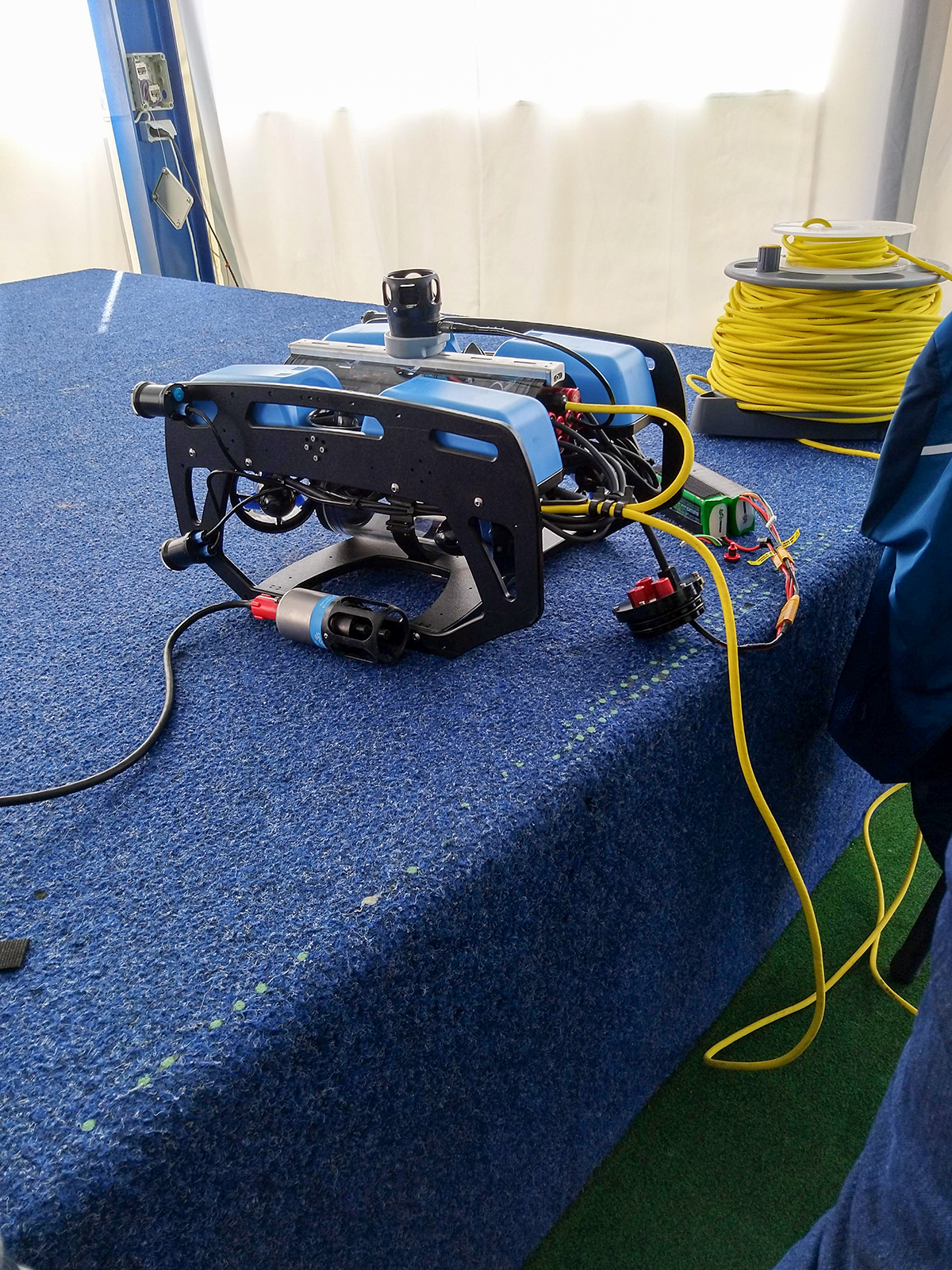
Squirtle is the LSTS Mini ROV integration of the BlueRobotics BlueROV2 platform. This system is another example of integration of COTS hardware into LSTS toolchain, enabling the control and command in our typical network.
For the control part, previous integrations were used from UAV Ardupilot projects having now also support for manual control for the Ardusub subproject. Besides the original ROV configuration, this system also has an acoustic modem which can be used for communication and positioning with other nodes underwater. This ROV model is also suitable for expanding its capabilities and payload modularly.
Fleet: 1
Specifications
ROV
| Length | 457 mm |
| Width | 338 mm |
| Height | 254 mm |
| Weight in Air (with Ballast) | 10-11 kg |
| Maximum Rated Depth | 100 m |
| Maximum Forward Speed | 1.5 m/s 3 knots |
| 6 thrusters | 4 Vectored | 2 Vertical |
Lights
| Brightness | 2 or 4 x 1500 lumens each with dimming control |
| Light Beam Angle | 135 degrees |
Camera
| Camera | 1080p digital, USB, Low Light |
| Camera Field of View | 80 degrees horizontally |
| Tilt Range | +/- 90 degree camera tilt (180 total range) |
| Tilt Servo |
Hitec HS-5055MG |
Sensors
| 3-DOF Gyroscope |
| 3-DOF Accelerometer |
| 3-DOF Magnetometer |
| Internal barometer |
| Blue Robotics Bar 30 Pressure/Depth & Temperature Sensor (external) |
| Current and Voltage Sensing |
| Leak Detection |
Battery
| Battery Life (Normal Use) | 2-3 hours w/ 18Ah battery |
| Battery Life (Light Use) | 4-6 hours w/ 18Ah battery |
Tether
| Diameter | 7.6 mm |
| Length | 25-300 m |
| Working Strength | 45 kgf/100 lbf |
| Buoyancy in Freshwater | Neutral |
| Buoyancy in Saltwater | Slightly positive |
| Conductors | 4 twisted pairs, 26 AWG |
Features
Underwater Imaging and Inspection
Acoustic Communication
Image

Image

Image
Image
