Final demonstration of the RaMP Project

Last June 22nd, the workshop and final demonstration of the RaMP project took place.
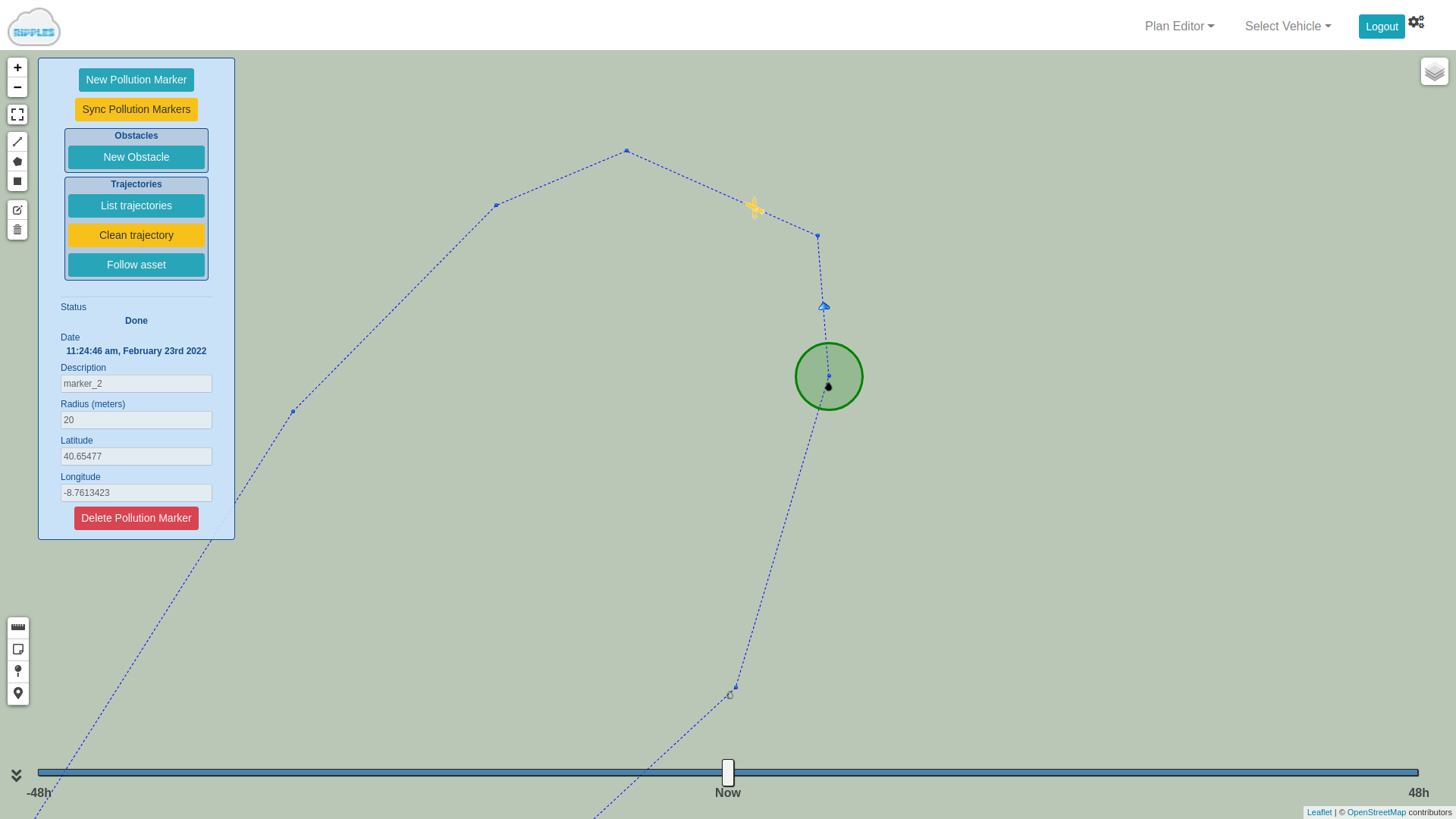
The demonstration of the RAMP System with autonomous vehicles took place at Praia da Barra in the morning.
During the afternoon, the workshop took place in the Amphitheater of the Physics Department of the University of Aveiro with the following sessions:
- Presentation of the RaMP System (LSTS - FEUP)
- Implementation of Numerical Model for RaMP System (NMEC-UA)
- Impact of robotics on the future of Combating Pollution at Sea (DGAM)
- Guest Lecture - Prof. Dr. Javier Gilabert (Universidad Politécnica de Cartagena)
The RaMP - Rapid-response to Marine Pollution project proposes the development and empowerment of low-cost autonomous air, surface and submarine vehicles for operations of prevention, monitoring, surveillance and response to marine pollution events. In conjunction with current numerical modelling tools, it aims to minimize the inherent costs to operations, increase their speed and facilitate the identification of polluting sources. Through the design and implementation of simple rapid sampling processes, this project aims to increase national capacity for monitoring and response to marine pollution while minimizing risks and safeguarding ecosystems, material assets and human lives.
More information about the project at ramp.lsts.pt.











No passado dia 22 de junho decorreu o workshop e demonstração final do projeto RaMP.
A demonstração do Sistema RAMP com veículos autónomos, teve lugar na praia da Barra pela manhã.
Durante a tarde decorreu o workshop no Anfiteatro do Departamento de Física da Universidade de Aveiro com as seguintes sessões:
- Apresentação do Sistema RaMP (LSTS - FEUP)
- Implementação de Modelo Numérico para o Sistema RaMP (NMEC-UA)
- Impacto da robótica no futuro do Combate à Poluição no Mar (DGAM)
- Palestra Convidada - Prof. Dr. Javier Gilabert (Universidad Politécnica de Cartagena)
O projeto RaMP - Rapid-response to Marine Pollution propõe o desenvolvimento e capacitação de veículos autónomos aéreos, de superfície e submarinos de baixo custo para operações de prevenção, monitorização, fiscalização e resposta a eventos de poluição marinha. Em atuação conjunta com as atuais ferramentas de modelação numérica, visa minimizar os custos inerentes às operações, aumentar a sua rapidez e facilitar a identificação das fontes poluidoras. Através do desenho e implementação de processos simples de amostragem rápida, este projeto ambiciona aumentar a capacidade nacional de monitorização e resposta à poluição marinha e, ao mesmo tempo, minimizar riscos, salvaguardando os ecossistemas, bens materiais e vidas humanas.
Mais informação sobre o projeto em ramp.lsts.pt.




